| Полный конспект лекций по Инженерной геодезии 25 лекций |
 |
 |
| Добавил(а) Administrator |
| 15.02.11 19:49 |
|
Страница 12 из 38
При К = 0 и К = 1 сомножитель
Отсюда вывод (пусть сами подумают) – наименьшая погрешность положения т.а если станция посредине между А и В. Если мы произведем интегрирование эти сомножители (положение точки а)
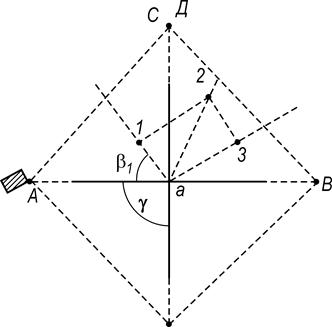
Включает в себя две погрешности: 1 – измерение длины линии мерным прибором (не более 0,1 мм на плане) 2 – погрешность отложения линии при нанесении ее на план (0,08мм), тогда Если АВ < 3 расстояния от прибора до рейки, то для ориентирования прибора применяют направление АС, а АВ – для контура ориентирования. Если дополнительно измерить расстояние Вв и отложить его на плане, то среднее из двух положений т. а будет значительно точнее, чем определение с одной контурной точки. Б). Положение станции а на пересечении створов систем АВ и СД.
Если фигура АВСД имеет форму ромба или квадрата (или близкую) то Если прямоугольную с соотношением длинной и короткой сторон кА 2,4 то Контроль, как и в предыдущих случаях. Не рекомендуется получать положение т.а угловой или линейной засечками, т.к. в этом случае погрешность будет 1,5-2 раза больше погрешности положения контурной точки, с которой производится засечка. В таких случаях применяются способ обратной многократной засечки не менее чем с 4-х направлений. Положение т а на плане определяется способом БОЛОТОВА. 4. Съемка способом перпендикуляров относительно линии, опирающейся на контурные точки.
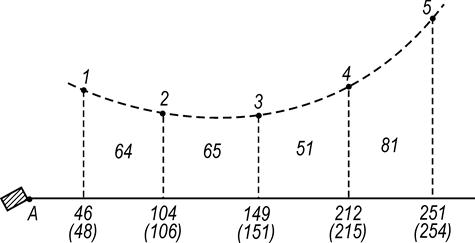
Съемка может выполняться относительно любой линии между контурными точками (напомнить принципы съемки). Погрешность нанесения на план каждого основания
равняться 0,39 мм. В положение контурных точек 1,2,3,4….. снимаемых относительно линии АВ, прибавятся погрешности положения снимаемых точек m t1, mt2 и т.д. на эту погрешность будет влиять: 1-погрешность построения перпендикулярности Если принять принципы равных влияний и каждую из погрешностей принять 0,1 мм , то
погрешность положения снимаемой точки (не выходит за пределы 10% ничтожности). В результате, например для плана масштаба 1:10000, можно во-первых, округлять значения результатов измерения до 1 м (СКП округления – 0,3 м); во-вторых, перпендикуляр длиной до 20 м – на глаз, до 50 м – измеряют выверенным шагомером, до 200 м – деревянным циркулем. Лекция 7 КОРРЕКТИРОВКА ПЛАНОВО-КАРТОГРАФИЧЕСКОГО МАТЕРИАЛА (окончание)
1. Съемка относительно линий съемочных ходов, опирающихся на контурные точки. 2. Использование аэроснимков новой аэрофотосъемки при корректировке планов или карт. 3. Оформление результатов корректировки, контроль. 4. Исправление площадей угодий после корректировки плана. Если количество опорных контурных точек не велико и расстояние между ними большие, приходится прокладывать съемочные ходы, опирающиеся на эти точки. Т.к. исходные данные при этом имеют разную точность, все измерения в ходах производят в расчете на их графическое построение на плане. На местности точки ходов закрепляются кольями с окопкой, чтобы их можно было использовать при контрольных измерениях. Длина ходов не более 15 см на плане, линейные невязки не более 1 мм. Увязка ходов производится способом параллельности линий. Съемка относительно точек и линий ходов производится методом перпендикулярности, полярным способом, иногда угловых засечек. Для контроля в съемку включают другие контурные точки, изображенных на плане. 1. Способы проложения ходов Теодолитный ход без примычных углов (примычные углы не измеряют из-за больших погрешностей в исходных направлениях между опорными контурными точками). Стороны измеряются мерными приборами с точностью 1:1000. Углы меряют одним полуприемом с контролем по магнитным азимутам. Вначале ход строят на кальке в масштабе плана по измеренным углам и сторонам. Затем, неточные точки совмещают с идентичными точками на плане и при допустимой линейной невязке ход на кальке увязывают способом перпендикулярности линий, после чего исправленные положения точек хода перекалывают на план. Кальку сохраняют как технический документ и приобщают к делу. Если мы строим ход румбам, выраженным по измеренным углам (принимая румб первой линии за произвольный), то получаем ход нанесения точек хода на план, построение снятой ситуации производят обычным способом.
СКП положения т.а хода после его увязки определяем, рассчитав ее относительно опорных контурных точек А и В
|